
MARIS: Marine Autonomous Robotics for InterventionS
National Project PRIN (2013-16)
- Experiments: Albaro, Genova, 2015-2016
- Dataset Acquisition: Portofino, September 6th 2014
- Dataset Acquisition: Bardolino and Malcesine, Garda 2013
- References
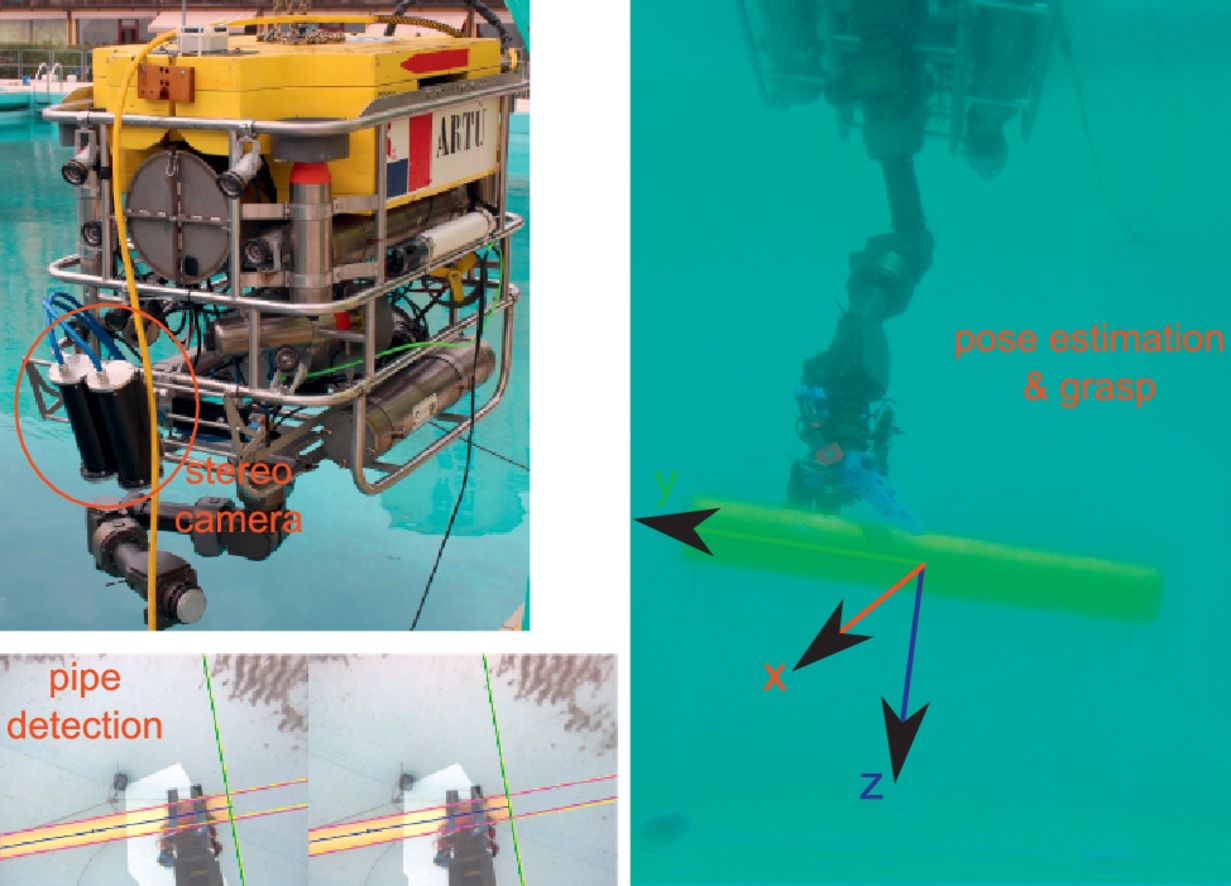
Experiments: Albaro, Genova, 2015-2016
Software: Maris Vision
| Maris Vision is the collection of ROS packages used in Albaro Experiments for MARIS project. If you use Maris Vision, please cite the following papers. | |
|
||
|
Dataset Acquisition: Portofino, September 6th 2014

A new underwater acquisition session took place near Porfofino on Sept. 6th 2014 with the great logistic support from the Federazione Italiana Attività Subacquee (FIAS) of Parma. The scuba divers brough the underwater stereo vision system designed by RIMLab 10 m depth in order to acquire this new dataset consisting of about half-an-hour sequence of image frame pairs. Such synchronized frames allows the 3D reconstruction of objects and of the (amazing!) underwater environment.
Copyright Notice
RIMLab is the copyright holder of all the images included in the dataset.
If you use this dataset, please cite one of the following papers:
- F. Oleari, F. Kallasi, D. Lodi Rizzini, J. Aleotti, S. Caselli, An Underwater Stereo Vision System: from Design to Deployment and Dataset Acquisition, Proc.~of the IEEE/MTS OCEANS, Pages 1-6, May 19-21, 2015. DOI http://dx.doi.org/10.1109/OCEANS-Genova.2015.7271529 [DOI] . [bibtex] [project]
- F. Kallasi, D. Lodi Rizzini, F. Oleari, J. Aleotti, Computer Vision in Underwater Environments: a Multiscale Graph Segmentation Approach, In Proc.~of the IEEE/MTS OCEANS, Pages 1-6, May 19-21, 2015. DOI 10.1109/OCEANS-Genova.2015.7271531 [DOI] . [bibtex] [project]
Dataset Description
[README]Download
[MARIS_Dataset_set1.tar.xz][MARIS_Dataset_set2.tar.xz]
[MARIS_Dataset_set3.tar.xz]
Dataset Acquisition: Bardolino and Malcesine, Garda 2013
In summer 2013, we acquired an initial dataset close in the Lake Garda. The raw dataset in rosbag format is available here. If you use this dataset, please cite one of the following papers:
- D. Lodi Rizzini, F. Kallasi, F. Oleari, and S. Caselli. Investigation of Vision-based Underwater Object Detection with Multiple Datasets. International Journal of Advanced Robotic Systems (IJARS), 12(77):1-13, may 2015. DOI 10.5772/60526 [DOI] [bibtex] [project]
- F. Oleari, F. Kallasi, D. Lodi Rizzini, J. Aleotti, and S. Caselli. Performance Evaluation of a Low-Cost Stereo Vision System for Underwater Object Detection. In Proc. of the World Congr. of the International Federation of Automatic Control (IFAC), pages 3388-3394, Aug. 24-29, 2014. ISSN: 09210296, DOI 10.3182/20140824-6-ZA-1003.01450 [DOI] . [bibtex] [project]
References
E. Simetti, F. Wanderlingh, S. Torelli, M. Bibuli, A. Odetti, G. Bruzzone, D. Lodi Rizzini, J. Aleotti, G. Palli, L. Moriello, and U. Scarcia Autonomous Underwater Intervention: Experimental Results of the MARIS Project. IEEE Journal of Oceanic Engineering, Volume 43, Issue 3, July 2018, DOI 10.1109/JOE.2017.2733878. [DOI] [bibtex] . [code]
D. Lodi Rizzini, F. Kallasi, J. Aleotti, F. Oleari and S. Caselli. Integration of a stereo vision system into an autonomous underwater vehicle for pipe manipulation tasks. Computers & Electrical Engineering, Volume 58, February 2017, Pages 560-571, ISSN 0045-7906, DOI 10.1016/j.compeleceng.2016.08.023. [DOI] [bibtex] . [project]
G. Casalino, M. Caccia, S. Caselli, C. Melchiorri, G. Antonelli, A. Caiti, G. Indiveri, G. Cannata, E. Simetti, S. Torelli, A. Sperindé, F. Wanderlingh, G. Muscolo, M. Bibuli, G. Bruzzone, E. Zereik, A. Odetti, E. Spirandelli, A. Ranieri, J. Aleotti, D. Lodi Rizzini, F. Oleari, F. Kallasi, G. Palli, U. Scarcia, L. Moriello, E. Cataldi. Underwater Intervention Robotics: An Outline of the Italian National Project MARIS. The Marine Technology Society Journal 50 (4) (2016) 98-107, DOI 10.4031/MTSJ.50.4.7 [DOI] . [bibtex]
F. Oleari, D. Lodi Rizzini, F. Kallasi, J. Aleotti and S. Caselli. Issues in High Performance Vision Systems Design for Underwater Interventions. The 42nd Annual Conference of IEEE Industrial Electronics Society (IECON), pages 1-6, Oct. 24-27, 2016. DOI - [DOI] . [bibtex] [project]
D. Lodi Rizzini, F. Kallasi, F. Oleari, and S. Caselli. Investigation of Vision-based Underwater Object Detection with Multiple Datasets. International Journal of Advanced Robotic Systems (IJARS), 12(77):1-13, may 2015. DOI 10.5772/60526 [DOI] [bibtex] [project]
F. Oleari, F. Kallasi, D. Lodi Rizzini, J. Aleotti, S. Caselli, An Underwater Stereo Vision System: from Design to Deployment and Dataset Acquisition, Proc.~of the IEEE/MTS OCEANS, Pages 1-6, May 19-21, 2015. DOI http://dx.doi.org/10.1109/OCEANS-Genova.2015.7271529 [DOI] . [bibtex] [project]
F. Kallasi, D. Lodi Rizzini, F. Oleari, J. Aleotti, Computer Vision in Underwater Environments: a Multiscale Graph Segmentation Approach, In Proc.~of the IEEE/MTS OCEANS, Pages 1-6, May 19-21, 2015. DOI 10.1109/OCEANS-Genova.2015.7271531 [DOI] . [bibtex] [project]
F. Oleari, F. Kallasi, D. Lodi Rizzini, J. Aleotti, S. Caselli, Performance Evaluation of a Low-Cost Stereo Vision System for Underwater Object Detection, The 19th World Congress of the International Federation of Automatic Control (IFAC), Cape Town (South Africa), 24-29 Aug. 2014 [DOI] [bibtex]
F. Kallasi, F. Oleari, M. Bottioni, D. Lodi Rizzini, S. Caselli, Object Detection and Pose Estimation Algorithms for Underwater Manipulation, Advances in Marine Robotics Applications (AMRA), Padova, Jul. 15, 2014. [link] [pdf] [bibtex] [project]
F. Kallasi, F. Oleari, M. Bottioni, D. Lodi Rizzini, S. Caselli, Bio-Inspired Object Detection and Pose Estimation Algorithms for Underwater Environments, International Advanced Robotics Program (IARP), Workshop-Conference on Bio-inspired Robotics, ENEA-Frascati, Roma (IT), May 14-15, 2014. [link] [bibtex] [project]