
XDrone: Haptic teleoperation of UAV equipped with X-ray spectrometr for detection and identification of radio-active materials in industrial plants

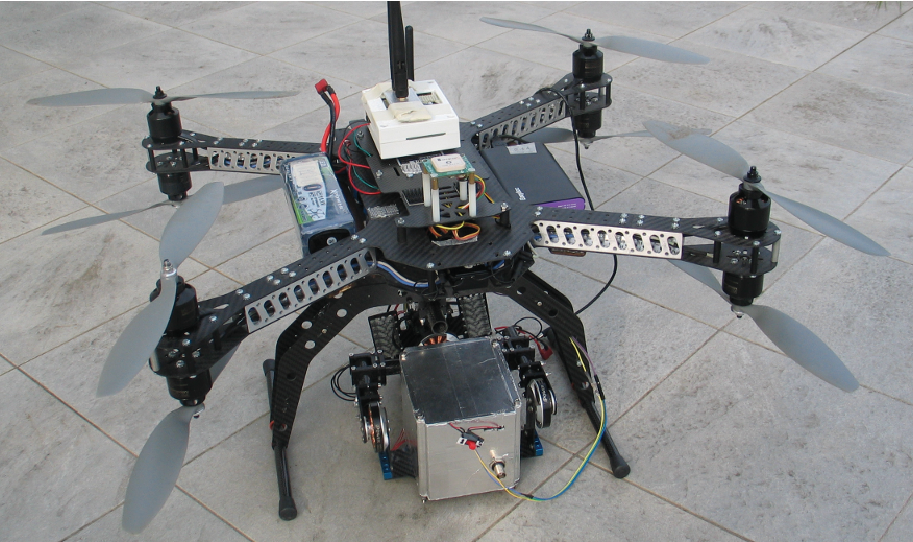
The project proposes haptic teleoperation of an unmanned aerial vehicle (UAV) for localization of radiation sources in industrial plants. Radiation sources will be localized and identified by equipping the UAV with a novel CdZnTe-based custom X-ray detector providing light, compact, spectroscopic, and low power operation. Large scale factories such as steel, wood, construction, recycling industries and landfills, involve procurement of raw material which may include radiating parts. Manufacturing operations are carried out in unstructured environments, where fully autonomous UAV inspection is hardly applicable. UAV operation with a “human in the loop” allows an expert operator to focus on selected candidate areas, thereby optimizing short flight missions in face of the constrained acquisition times required by nuclear inspection. To cope with the reduced situational awareness of the remote operator, the project will use force feedback as an additional sensory channel.

The project was founded by the CNR Progetto Bandiera "La Fabbrica del Futuro Piattaforma Manifatturiera Nazionale".

The project was jointly developed by IMEM-CNR of Parma and the Department of Information Engineering (DII) of University of Parma.
Scientific project coordinator:
Andrea Zappettini, IMEM-CNRzapp@imem.cnr.it
Parco Area delle Scienze 37/A, 43124, Parma, Italy
University of Parma principal investigators:
Stefano Caselli, Jacopo Aleottistefano.caselli@unipr.it, jacopo.aleotti@unipr.it
Parco Area delle Scienze 181/A, 43124, Parma, Italy
Published works
- G. Micconi, J. Aleotti and S. Caselli, Evaluation of a haptic interface for UAV teleoperation in detection of radiation sources, 2016 18th Mediterranean Electrotechnical Conference (MELECON), Lemesos, Cyprus, 2016, pp. 1-6. DOI: 10.1109/MELCON.2016.7495477 [DOI]
- G. Micconi, J. Aleotti, S. Caselli, G. Benassi, N. Zambelli and A. Zappettini, Haptic guided UAV for detection of radiation sources in outdoor environments, in Proceedings of 2015 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Cancun, 2015, pp. 265-271. DOI: 10.1109/RED-UAS.2015.7441016 [DOI]
- S. Caselli, J. Aleotti, G. Micconi, G. Benassi, N. Zambelli, D. Calestani, A. Zappettini, Unmanned Aerial Vehicle Equipped with Spectroscopic CdZnTe Detector for Detection and Identification of Radiological and Nuclear Material, IEEE NSS-MIC-RTSD Conference, San Diego, 31 Oct-7 Nov 2015.
Events
- Zappettini A., Aereal robotics for environmental monitoring, Annual conference of DIITET-CNR, Pisa, 2015.
- Prototype showcase at CPExpo 2014, global expoconference on Critical Infrastructures Protection (Genova), 9-11 Dic 2014.