
Software
|
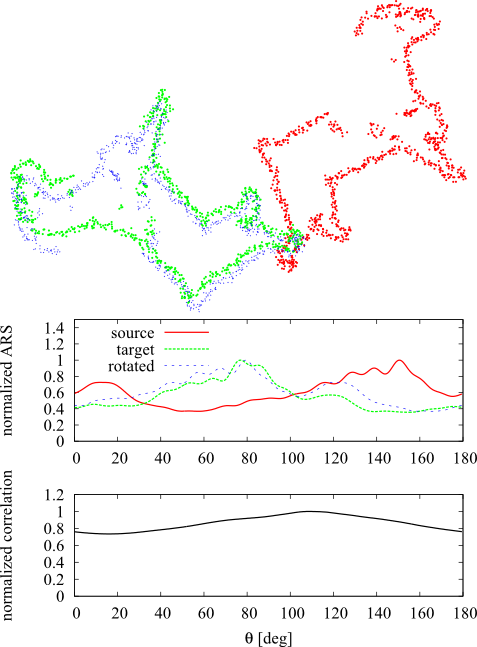
ARS is a library that implements Angular Radon Spectrum method for estimation of rotation.
There is also Cud-ARS, the GPU-based implementation.
The main references to the method are
D. Lodi Rizzini, Angular Radon Spectrum for Rotation Estimation. Pattern Recognition, Volume 84, Dec. 2018, Pages 182-196, DOI 10.1016/j.patcog.2018.07.017. [DOI] [bibtex] . [code] D. Lodi Rizzini and E. Fontana. Rotation Estimation based on Anisotropic Angular Radon Spectrum. IEEE Robotics and Automation Letters (RA-L), Accepted, 2022. DOI 10.1109/LRA.2022.3182111 [DOI] [bibtex] . [code] Datasets used in the experiments: MPEG7. |
|
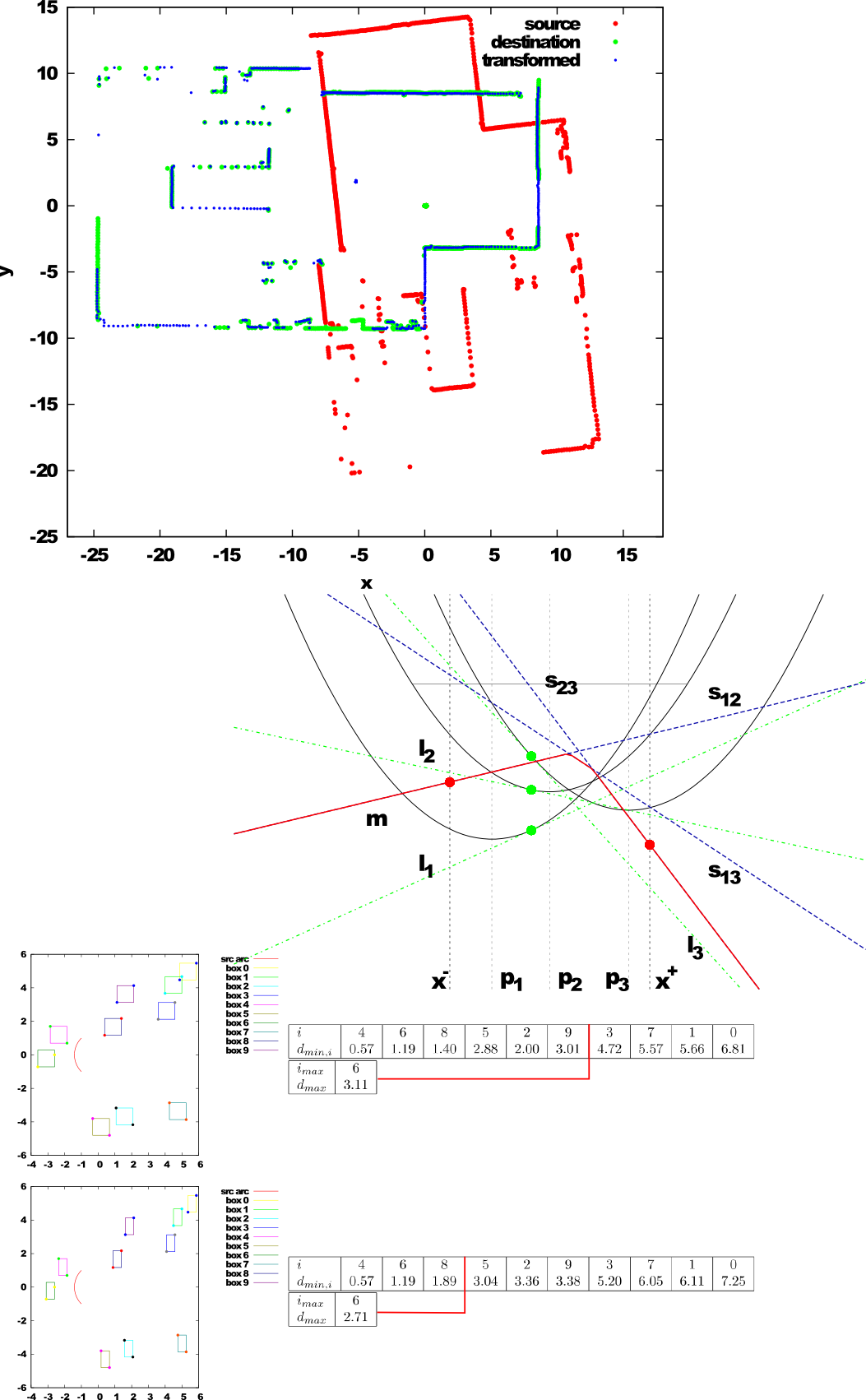
glores is a library that implements the globally optimal registraion method using two lower bound estimations.
The main reference to the method is
L. Consolini, M. Laurini, M. Locatelli, D. Lodi Rizzini. A Second-Order Lower Bound for Globally Optimal 2D Registration. Submitted, arXiv:1901.09641. [code] |
|
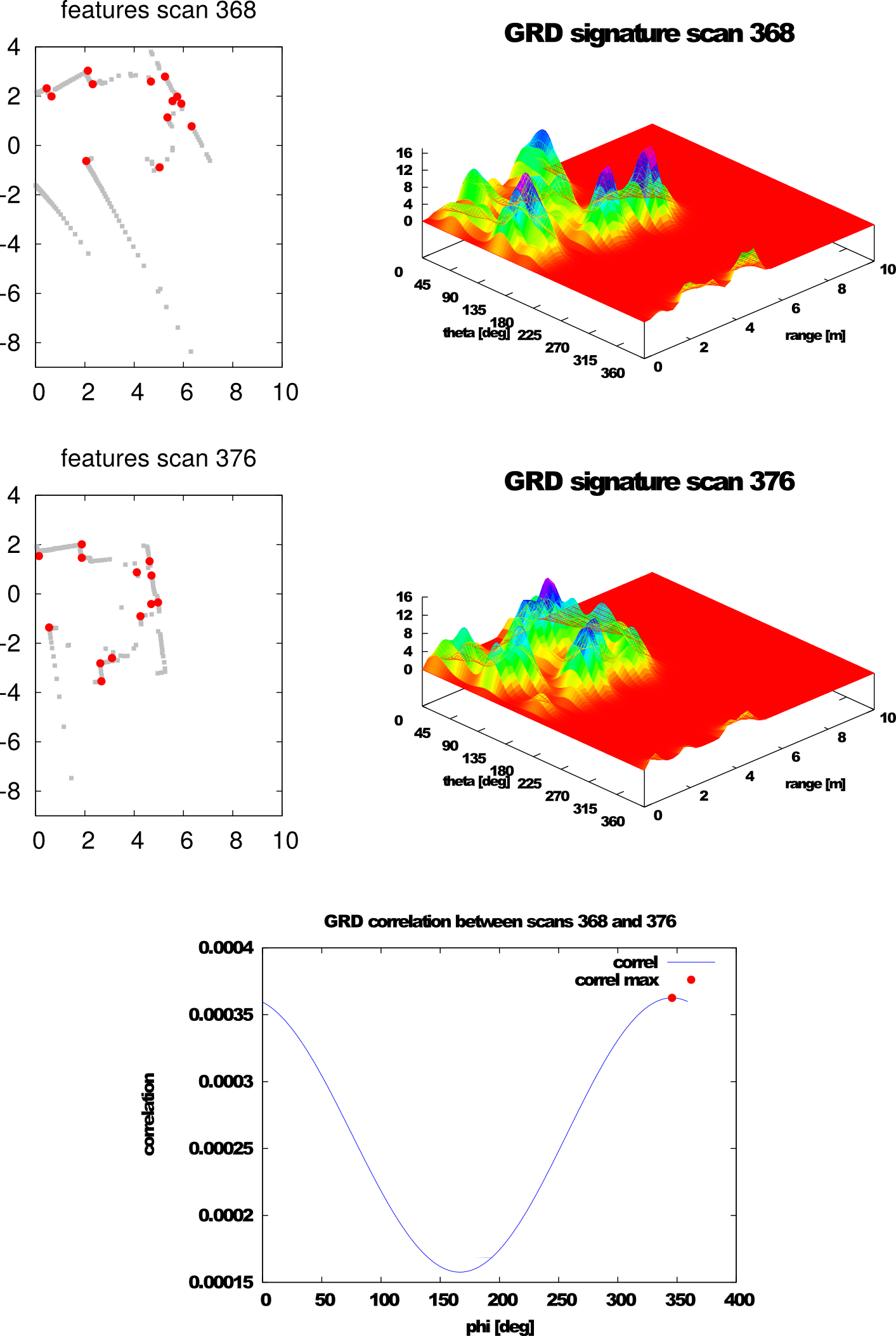
GRD is a library that implements Geometric Relation Distrbution, a geometric signature for loop closure in 2D point-based localization and mapping.
The main reference to the method is
D. Lodi Rizzini, F. Galasso and S. Caselli. Geometric Relation Distribution for Place Recognition. IEEE Robotics and Automation Letters (RA-L), 4(2):523-529, 2019. DOI 10.1109/LRA.2019.2891432 [DOI] [bibtex] . [code] |

|
FALKOLib. A library containing keypoint detectors for the stable detection
of interest points in laser measurements and two descriptors for robust associations.
GLAROT-3D. The library implements a geometric signature to select loop closure candidates. It has been kept to a minimal design.. |
|
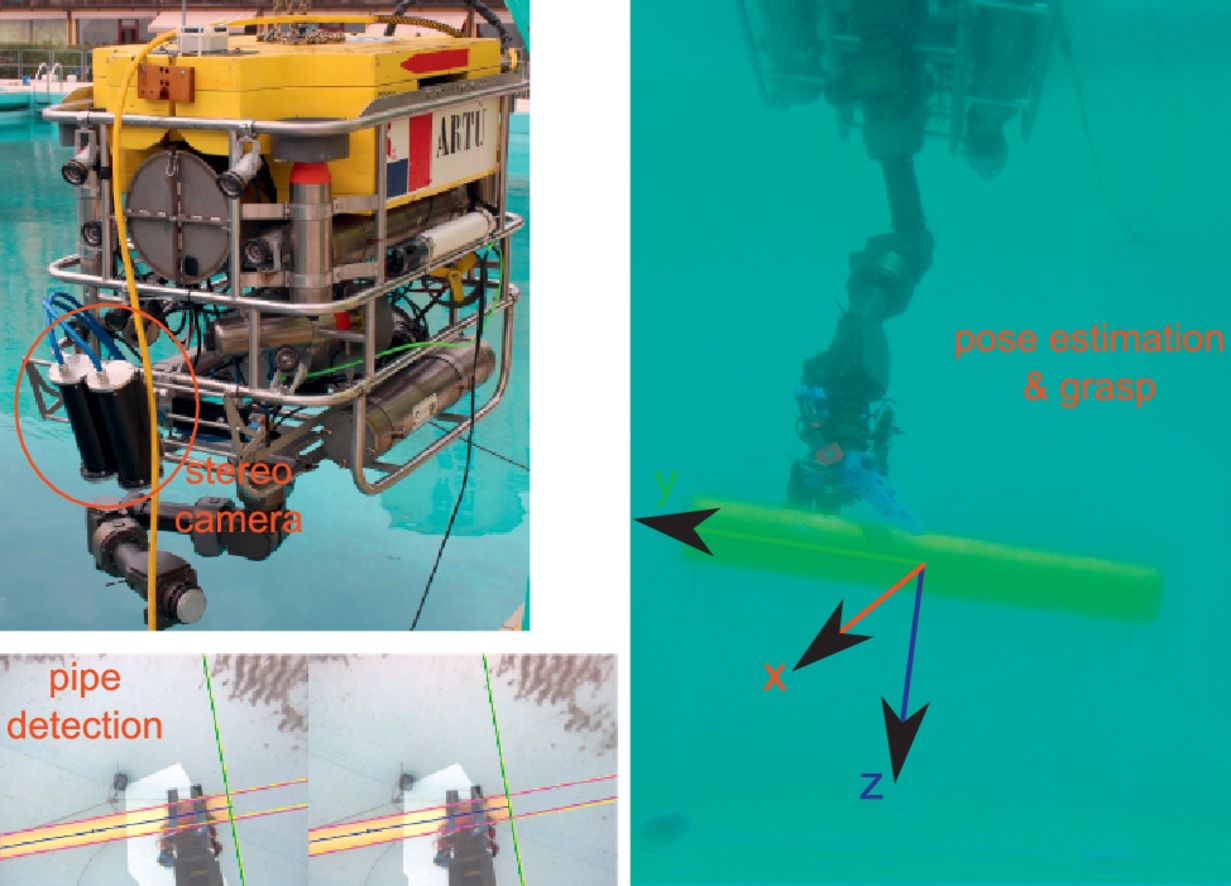
Maris Vision is a collection of ROS packages implementing the software of vision system used in MARIS project. |
|
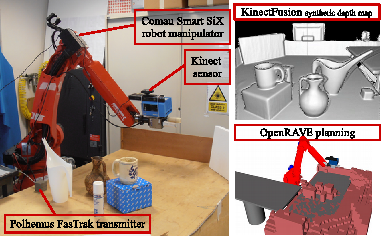
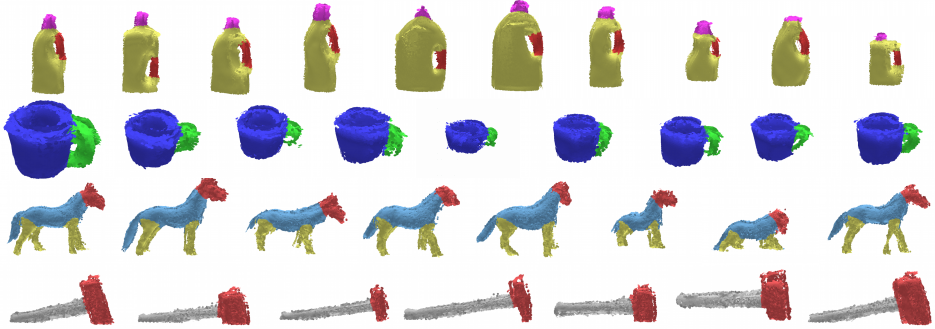
Open-source software about 3D perception and next-best-view planning.
|
|
Datasets:
|